Projects
SEDS Celestia (BITS Goa)
Advance Smoke Detector
The aim is to create a smoke detector that, using an array of sensors, will be able to analyze different scenarios. This includes but is not limited to predicting the fire's source, guesstimating the fire's distance, and from that, just how deadly it is. It will achieve this by having smoke filters, gas sensors, heat sensors, and fire sensors for hardware. The software will have scenarios decided upon based on testing along with the mathematical model results of the distribution of smoke. The project is currently still in the research phase. We are mainly researching the different temperatures and the particulate density of different sources of fire cause. Along we this, we are also researching the filtrate system that will be required to filter out smoke.


Piezoelectric Generator
We aim to develop a hardware system made of piezoelectric transducers through which we will be able to harvest motional vibrational energy in an economically feasible manner. The project is ongoing.
Occultation and Automation
Occultation is the phenomenon of one object hidden by another object passing in front of it. The automation of the mount done will be used to track the stars or the celestial bodies being observed under occultation. The event will be recorded by application of astrophotography with the star tracker system and the data/observations hence collected will be reported. Observing occulations is one of the aims/reasons of automating the telescope and making the star tracking system.


Rocketry
The project aims to primarily build rockets, initially working in model rocketry and then moving to amateur rocketry, and try to land the propulsively, i.e., land upright with thrust.
EINSat
(Exoplanet INvestigation Satellite) is the CubeSat project of SEDS- Celestia and the first CubeSat undertaking in BITS Pilani K.K. Birla Goa campus. The aim of our project is to design and build a 3U CubeSat which will be deployed to low-earth orbit and monitor stars to detect exoplanet transits.


BCI
We are trying to design an interface that translates electrical signals from brain to digital signals that computer understands. The computer then converts these signals to machine commands that controls an output device. In our case, a simple rover with allowed motion in all 4 direction.
Cansat
A CanSat is a simulation of a real satellite integrated within the volume and shape of a soft drink can. The challenge for the students is to fit all the major subsystems found in a satellite, such as power, sensors and a communication system, into this minimal volume. The CanSat is then launched to an altitude of a few hundred metres by a rocket or dropped from a platform or captive balloon, and its mission begins: to carry out a scientific experiment and achieve a safe landing.


Acoustic Camera
An acoustic camera is just like a regular optical camera, but is used to capture sound instead. Our project's aim is to create an open-source acoustic camera at significantly lower cost than commercial devices.


3D LiDAR
The team was successfully able to design and complete the LiDAR.
- We were able to complete the 2D version by the end of First Semester of 2019-20.
- The 3D version, capable of rotation in two axes was developed in the first month of Second Semester of 2019-20.
- Using proper calibration and efficient scanning methods, the speed and accuracy of the sensor was increased to an extent that it could scan a room in about 5 minutes.
- The Project was successfully demonstrated during Quark'20.
Pyroboard
A Rubens’ tube, also known as a standing wave flame tube, or simply flame tube, is an antique physics apparatus for demonstrating acoustic standing waves in a tube. A flammable gas is passed through a drilled tube and the gas is vibrated using a speaker. We can see the standing waves produced by the input sound in the form of flames coming out of the drilled holes. A 2D version of a Ruben’s tube is called a Ruben’s board or simply, Pyro Board.


Externally-Randomized-Encryption-Service
We aim to create an encryption algorithm that depends on randomness naturally found as a source of the key. We shall be doing this in two phases:
- Key generation: We shall be using one of the following methods to generate a binary sequence - White Noise Analysis, Position of Stones in Rice, Photograph database.
- Encryption: To encrypt the plaintext, we shall use Vernam cipher (or a modification of it). To code the encryption and the generating key, we will make use of Python and its various libraries.
Quantum Chess
Quantum chess works on the same rules as classical chess, but each piece has quantum abilities, too- you can put a piece in a superposition or even entangle two pieces. Our version is built using Qiskit and is a great way to demonstrate and understand quantum properties. The game needs a good understanding of how various probabilities interact to comprehend how the state collapses upon observation, which happens when the piece is either captured or being captured and decides the position of a piece in superposition. These probabilities are decided by the quantum state of the piece and thus adds an element of chance to this game of strategy.

Star Tracker
StarTracker is a telescope mount which will track and display, the object aimed by the
telescope on Stellarium in real time.
The team has successfully completed the second prototype.
SEDS VIT
Rover and Drone
Currently building a Martian rover prototype for URC 2023 competition, along with a small autonomous drone of 5kg.


SUAS
Student Unmanned Aerial Systems - An aerial system is to be built, capable of fully autonomous flight and navigation,
payload dropping, obstacle avoidance and various other tasks.
- So far the team has managed to run codes on the UGV(unmanned ground vehicle) to maneuver autonomously and communicate with the ground station.
- Final design, electrical and mechanical components' specifications and flight time calculations and predictions have been done.
- The short term goal is to achieve manual flight and practically measurethe flight time and weight lifting capacity of the drone.
URC
University Rover Challenge - The aim is to build a Martian rover prototype that can carry out some tasks on a Martian terrain which is only remotely operated.
- The team has completed the design phase which includes the mechanical design, the software architecture design, electrical architecture etc.
- The team will now begin the manufacturing and assembling phase where it will start to implement the plans made for the University Rover Challenge.


ERC
European Rover Challenge - The goal of the project is to construct a rover which can compete in tasks analogous to those performed by rovers on the surface of Mars and the Moon.
The team was successful in achieving the 19th rank in European Rover Challenge 2019 in the world.
UAV
The aim of this project is to build an autonomous Unmanned Aerial Vehicle (UAV) to assist people during disasters by:
- Delivering a first aid kit containing Aspirin, inhaler for asthma patients, non-perishable food items (crackers), antiseptic cream, antibiotic tablets, gauze, cotton, rubbing alcohol, burn ointment and band-aids
- Surveying the affected area and,
- Locating victims with the help of face detection and object tracking.


IARRC
Team Hydra, a subdivision of SEDS-VIT Projects Team is participating in the IARRC (International Autonomous Robot Racing Challenge). The competition provides students with real-world, hands-on engineering design challenges, including components of mechanical, computer, control software, and system integration.
The aim of this project is to build a small semi-rugged outdoor vehicle which will be able to carry a payload of at least 10kg. All of the car controls should be completely autonomous.
Self-Balancing Bot
Self-balancing bot, as the name suggests is a robot that balances itself on two wheels. It uses the MPU6050 sensor to measure the tilt. The Arduino processes the readings from the sensors using the PID algorithm and accordingly forces the motors to change the direction to balance the bot in a vertical position.


Gesture Bot
This robot moves on the basis of input translated from hand gestures (tilt of hand) made by the person controlling it. It can move in all four directions and is wireless. It uses an RF module to communicate between the transmitter on the glove and receiver on the bot. It also has PWM, the more the hand is tilted in a direction the more is the speed of the robot.
Gravity Light
Gravity Light is a device that uses the potential energy of a mass 'm' at a height that is made to fall. The basic principle here is the conservation of energy, and its transformation from one form to another. During the fall, the potential energy is converted into electrical energy using a system of pulleys and a generator. This is used to light up an LED lamp to give light. This device can be used to replace fuel lamps in third world countries and provide a sustainable source of energy to millions.


Quadcopter - FRS Security System
It is a security drone made to monitor the security of your surroundings with the help of Face Recognition Sofware (FRS). The components required are Frame Motor x4, Electronic Speed Control (ESC) x4, Flight Control Board, Radio transmitter and receiver, Propeller x4 (2 clockwise and 2 counter-clockwise), Battery and Charger.
Tic-Tac-Toe
An app based game (tic tac toe) developed for android smartphones using Photoshop and Android Studio.

SEDS SNU
Telescope training
Currently working on assembling a group of volunteers for the newly acquired telescope and training these volunteers to properly use the telescope. With this we have had a few events on campus for the rest of the crowd. We are also trying out astrophotography with the telescope.

SEDS Aurora
Sounding Rocketry
The aim of the project was to design and launch a two stage Rocket with controlled projectile and a recovery system. The team designed a propeller for a single stage Rocket having sugar candy propellant.

SEDS REC
Quadrone
Quadrone is a quadcopter controlled using an RF Transmitter and is installed with a mini FPV Camera with a Video Transmitter and Antenna. The Operating Range is of 450 m and is primarily used for Area Surveillance Applications.
The project is completed and the test verification is pending.

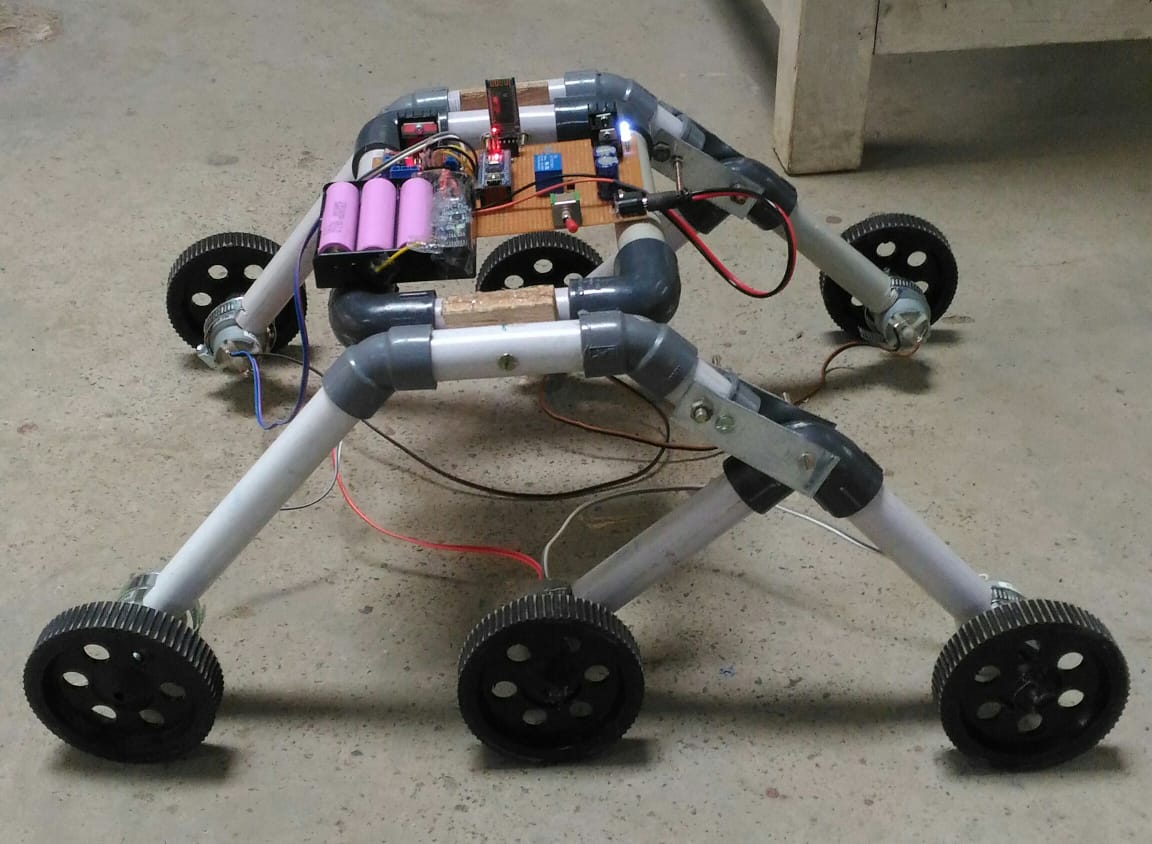
Extremity Rover
The team designed a Rocker bogie chassis made using PVC Pipes. The rover is controlled via Bluetooth using an Arduino Nano and is capable of treading through rough terrains.
The project is completed and all test verifications are done.
SEDS-BITSH
Thrust Vector System
Vector control is employed in commercial spacecrafts and it is not only used for adjusting the heading but is also used for landing (like SpaceX and Blue Origin). The team hopes to test out low power model rockets and implement this vectoring system to try to land them back. Initial calculations and the 3D printing of the thrust vector mount have been completed. The subsequent testing is on hold.

SEDS KCT
Sounding Rocketry
A Project on Small Scale Sounding Rocket with single stage at an altitude 2km for technical demonstrations. Currently, the project is in it's fabrication stage and planned to launch in December 2022.


Cubesat
A Project on Small Scale Satellite aimed to study the weather conditions at an altitude of 2km will be launched for data collection. Currently, the project is in it's design phase and planned to launch in December 2022.